
如何預防噴涂機器人發(fā)生碰撞
2022-03-28(4423)次瀏覽
噴涂機器人碰撞會造成非常嚴重的財產(chǎn)損失,有時會對人身造成傷害。噴涂機器人碰撞事件主要分為這幾種類型:1、機器人本體之間的相互碰撞;2、機器人與噴漆室室體之間的碰撞;3、機器人與待噴涂物之間的碰撞。針對不同的碰撞情況,在采取預防性措施時,會有較大的差別。下面松樂機器人與大家一起針對不同的碰撞情況進行逐一分析。

噴涂機器人
首先,對于機器人本體之間的相互碰撞以及機器人與噴漆室室體的碰撞來說,主要通過以下兩種方式來避免。,設置防撞檢測。在機器進行仿型示教時,以每臺機器人為中心設置一個防撞區(qū)。如下圖所示
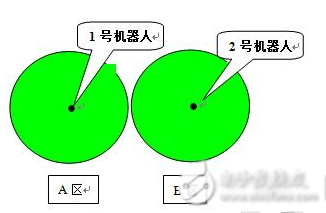
噴涂機器人位置圖
當機器人在進行正常作業(yè)時,以1號機器人為中心的A區(qū)是不允許2號機器人動作的,這樣就可以避免機器人本體之間的相互碰撞。,機器人各個軸的轉動是通過伺服電機來完成的。當機器人發(fā)生碰撞之后各軸的脈沖反饋值出現(xiàn)異常,機器人立即產(chǎn)生干涉報警,防止更為嚴重的碰撞事件發(fā)生。
其次,對于機器人與工件之間的碰撞來說,預防措施較多。,控制工件發(fā)生嚴重形變。增加多重檢測,對于容易發(fā)生形變的位置進行專業(yè)檢測。一旦發(fā)生形變立即產(chǎn)生報警以便于提醒現(xiàn)場人員進行處理。在涂裝車間我們目前采用的檢測手段主要有:后背門防撞檢測。車門開度檢測等。,從防止工件位置出現(xiàn)偏差入手。具體到涂裝的轎車生產(chǎn)線來說,將雙鏈的蓋板位置加高,防止出現(xiàn)摩擦。加強對鏈條的檢查及保養(yǎng),保證鏈條處于較為平穩(wěn)的運行狀態(tài)。對于編碼器的脈沖來說,采取編碼器防波動措施。在硬件位置無法改變的前提下,通過軟件控制(增加脈沖鎖存)來達到編碼器脈沖穩(wěn)定的效果,進一步保證雙鏈與滑撬之間處于同步運行狀態(tài)。具體如下:
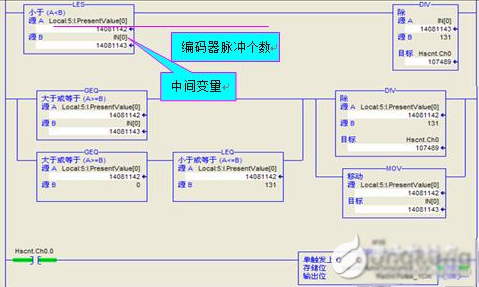
噴涂機器人分析
那么,如果真的已經(jīng)出現(xiàn)了位置偏差,能否在機器人與工件發(fā)生碰撞之前檢測出來呢?我們基于前幾次發(fā)生的車身碰撞事件進行了深入分析。發(fā)現(xiàn),之前出現(xiàn)的機器人車身碰撞位置均為機器人在進行路徑、角度轉換點。而每完成一個動作路徑之后機器人都要等待到下一步動作的起始點。這樣可以從這個起始點入手,制定防撞方案。
最新資訊
-

新能源逆變器智能生產(chǎn)線價格多少錢
新能源逆變器智能生產(chǎn)線的價格因多種因素而異,包括生產(chǎn)線的規(guī)模...
-

新能源儲能逆變器智能生產(chǎn)線有哪些
新能源儲能逆變器智能生產(chǎn)線是一種集成了高度自動化、智能化技術...
-

激光焊接機器人焊接方式
激光焊接機器人的焊接方式主要依賴于激光束作為熱源,通過聚焦激...
-

儲能逆變器智能生產(chǎn)線的技術特點
儲能逆變器智能生產(chǎn)線的技術特點主要體現(xiàn)在以下幾個方面:
4000-599-111
服務熱線:4000-599-111
聯(lián)系電話:13682445197
公司傳真: 0760-85286527
公司郵箱:hubao@sz-gsd.com
公司地址:翠亨新區(qū)香山大道34號西灣國家重大儀器科學園2號501




 4000-599-111
4000-599-111